7.1 Introduction
7.1.1 Motivation
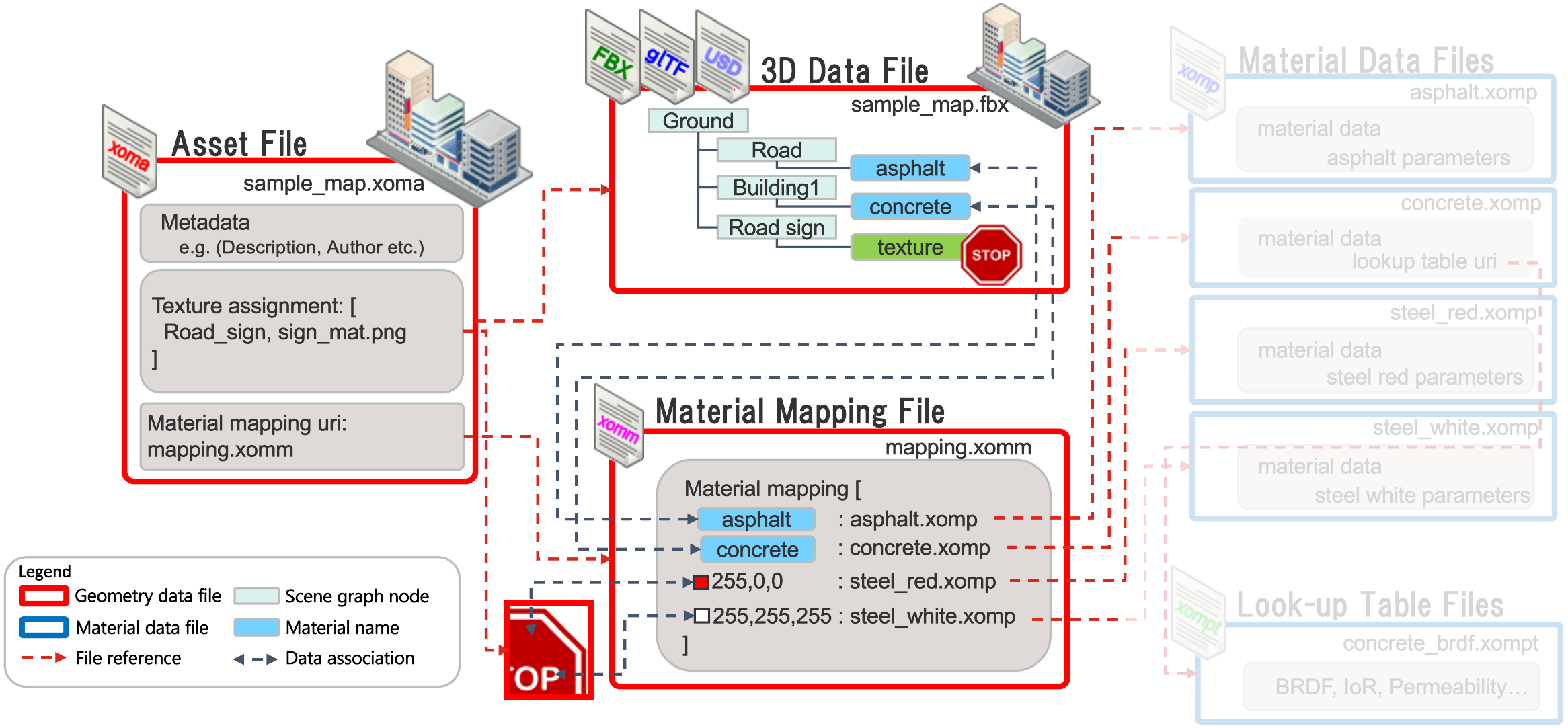
A 3D asset is a digital entity that includes a 3D geometric representation of an object (also known as 3D model or 3D Data File) along with its attributes and metadata. Common formats for storing the geometry and visual materials of 3D models include glTF, FBX, and USD.
However, these formats do not provide a standardized way to structure the geometry or provide extensive metadata storage and exchange capabilities. The ASAM OpenMATERIAL standard addresses these needs.
This chapter includes all geometry related definitions of ASAM OpenMATERIAL, marked in red in Figure 1.
The ASAM OpenMATERIAL Asset File (for example, "omg_my-model.xoma") contains essential information relevant to the display and interactivity attributes of the 3D model in various computer applications. This includes metadata, material mappings, and semantic information like coordinate system and pivot point descriptions. The mapping of materials is stored in a separate Material Mapping File (.xomm), which is linked in the Asset File. This setup ensures that the 3D asset (or 3D Data File) can be consistently integrated into complex simulations or real-time environments with detailed material and dynamic properties.
7.1.2 Applications
To accurately replicate how sensors interact with objects in the real world, it is essential to model the behavior of sensors like cameras, radars, and lidars based on the material and geometric properties of objects in a virtual environment. For this purpose, assets that conform to the ASAM OpenMATERIAL standards may be necessary in various scenarios, such as:
-
Accurate simulation of sensor perception: 3D assets are essential to ensure that sensors interact realistically with their environment. This includes both the visual representation, such as how objects appear and are detected by the sensor, and the material properties, like how objects reflect or absorb signals such as light or radar waves.
-
Dynamic and real-time environment simulation: 3D assets with changing materials or dynamic properties, such as moving parts like wheels, are necessary to simulate environments where the interaction between sensors and objects is constantly evolving.
-
Semantic labeling for machine learning applications: Assets with semantic information about sub-meshes, or labels for parts of objects, enable the system to understand and differentiate between different parts of an object, such as the wheels or windows of a car, aiding in accurate training.
-
Re-using 3D assets: Using the same asset file in different simulation tools is only possible if the structure of the assets is standardized.
7.1.3 Role of 3D exchange formats
3D exchange formats like glTF, FBX, and USD are widely used across various industries for standardized 3D model representation.
In the context of ASAM OpenMATERIAL, these formats form the foundation for seamlessly integrating ASAM OpenMATERIAL into existing 3D modeling and simulation workflows. Users can continue using their familiar tools and processes to manage geometry, while ASAM OpenMATERIAL extends these formats by adding material properties, semantic information, and dynamic behaviors through additional files, such as asset files and material mapping files.
7.1.4 Interaction with other ASAM standards
The ASAM OpenX standards strive to provide comprehensive, realistic, and most importantly, exchangeable simulation data for the development and testing of autonomous systems:
-
ASAM OpenDRIVE standardizes the description of road networks, including geometric definitions of the road, but primarily focuses on the semantic description of the road. The ASAM OpenMATERIAL object class "Environment" enhances this by allowing the definition of a comprehensive 3D environment that aligns with an ASAM OpenDRIVE map.
-
ASAM OpenSCENARIO is a file format created to describe dynamic content in driving and traffic simulators, with a primary focus on complex maneuvers involving multiple entities like vehicles and pedestrians. ASAM OpenMATERIAL defines node structures and metadata for these object classes to seamlessly integrate ASAM OpenSCENARIO definitions with a 3D model. The asset file (.xoma) of a static 3D environment SHALL be linked in ASAM OpenSCENARIO using the SceneGraphFile property. Asset files (.xoma) of individual objects, such as vehicles, SHALL be linked using the model3d property. Both environment and objects may either be given as an absolute path or as a path relative to the OpenSCENARIO file (.xosc). A relative path is indicated by a dot (.) as the first character. The paths to 3D assets specified in the scenario definition SHALL serve as single source of truth and be used consistently in simulation environments. In the case of distributed simulation environments, the paths SHALL be synchronized between all relevant simulation components. Synchronization MAY be implemented using ASAM Open Simulation Interface (see below).
-
ASAM Open Simulation Interface (OSI) is a specification for interfaces between models and components in a distributed simulation. OSI primarily focuses on the environmental perception of automated driving functions, but it also covers interfaces for models of traffic participants. The asset file (.xoma) of a 3D environment SHALL be linked in OSI using the GroundTruth::model_reference. Asset files (.xoma) of individual objects, like vehicles, SHALL be linked with the MovingObject::model_reference or the StationaryObject::model_reference. Both environment and objects may either be given as an absolute path or a relative path. A relative path is indicated by a dot (.) as the first character. As OSI transfers the data between tools and simulation models, the root path, that a relative model reference path is relative to, has to be given or known to all tools and models in the tool chain. This can be done with tool settings, configs or model parameters, e.g. an FMI parameter.